



2)下降重物时电路的工作情况
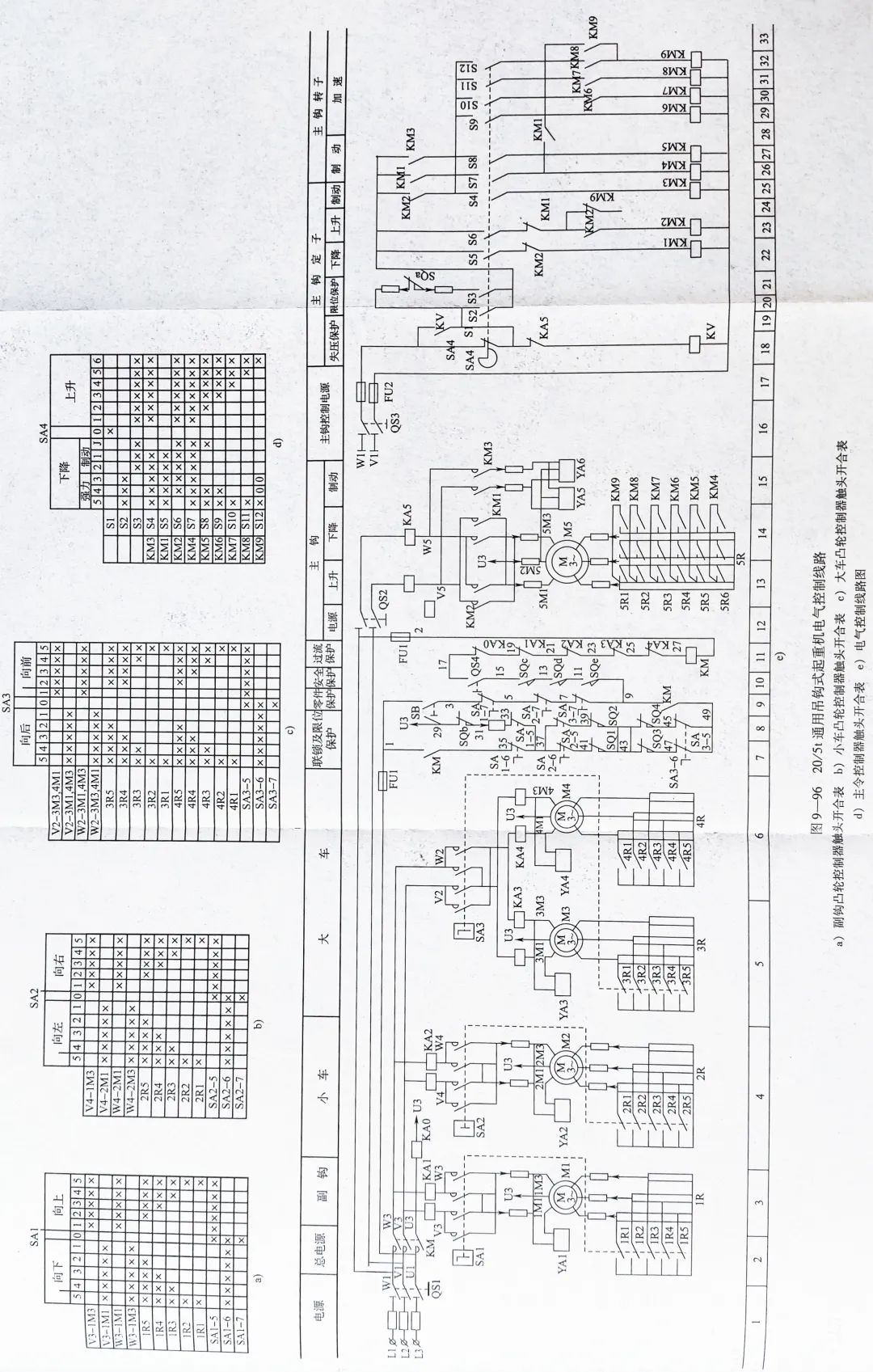
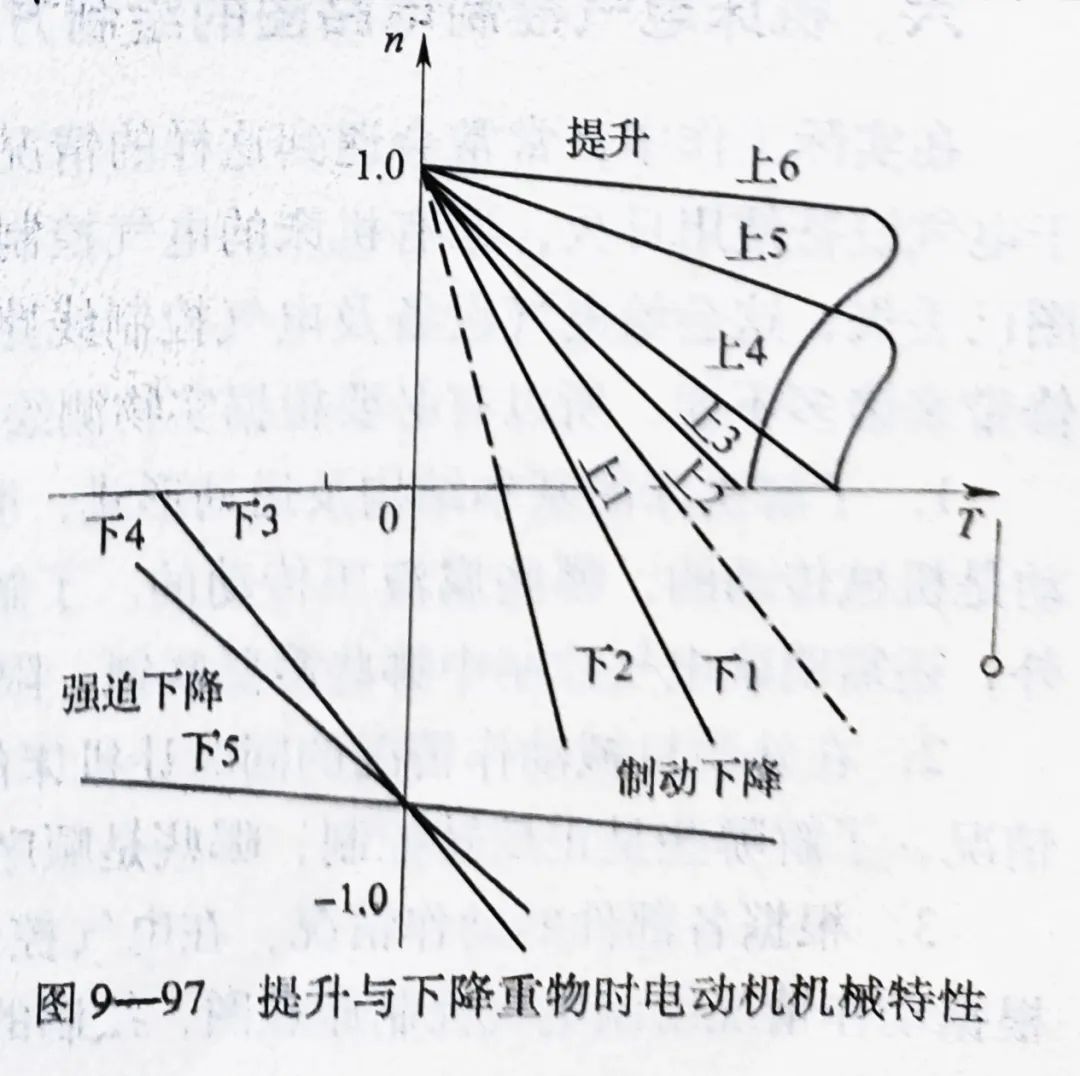
下图9-97提升与下降重物时电动机机械特性降重物时,主令控制器也有6个挡位。根据重物的重量,可使电动机工作在不同的状态下。若重载下降,要求低速,电动机可工作在倒拉反接制动状态;若空钩或轻载下降,必须采用强迫下降。在主令控制器下降的6个挡位中,前三个挡位即J、下1、下2为制动下降;后三个挡位即下3、下4、下5为强力下降。如当手柄由零位置扳到“J”挡位时,S3、S6、S7、S8闭合使KM2、KM4、KM5得电吸合,电动机通入正向电流,转子绕组电阻切除两段,但电磁抱闸将吊钩紧紧抱住,吊钩不动。当手柄置于下1与下2挡位时,S3、S4、S6、S7闭合,KM3得电吸合,电磁抱闸松开,KM5、KM4相继断电释放,特性曲线变软,获得机械特性中的下1、下2两条特性,电动机工作在倒拉反接制动状态。当手柄置于下3、下4、下5三个挡位时S4、S5、S7、S8、S9、S10、S11、S12相继闭合,KM4、KM5、KM6、KM7、KM8、KM9相继通电吸合,电阻逐级切除,电动机转速逐级升高,电动机工作在强力下降的下3、下4、下5三条特性曲线上。
(3)副钩的控制
副钩的控制采用的是凸轮控制器SA1,它有10个挡位,上升、下降各有五个挡位;采用对称接法,即控制器手柄处在正转和反转的相应位置时,电动机的工作情况完全相同。正转的上1挡位为预备挡,手柄位于上2、上3、上4、上5挡位时电动机转速逐渐上升。下降的五个挡位,如果是轻载则电动机工作在强力下放的状态,若是重载则电动机工作在回馈制动状态,如图9-98所示。
(4)大车、小车用凸轮控制器的控制
大车、小车的控制特点与副钩的控制基本上相同,所不同的是电动机只能工作在正反向电动状态轻载强力下放而不可能工作在回馈制动状态。
下一篇:起重机技术法规与标准


